Коренченков А.А.
Технологический институт Южного федерального университета ,
Российская Федерация
АНАЛИТИЧЕСКИЙ СИНТЕЗ ОПТИМАЛЬНЫХ ПО БЫСТРОДЕЙСТВИЮ СИСТЕМ УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМИ РОБОТАМИ
Поиск перспективных подходов к увеличению производительности современных роботизированных технологических комплексов (РТК) на основе использования манипуляционных роботов (МР), прежде всего, за счёт сокращения длительности цикла производственного процесса, определяет необходимость в новых методах конструирования систем управления (СУ) МР, реализующих оптимальные по быстродействию алгоритмы управления.
Подавляющее большинство существующих методов синтеза оптимальных по быстродействию регуляторов МР базируются на линейном представлении математической модели МР, т.е. частичном или полном пренебрежении эффектами, обусловленными действием кориолисовых, центробежных и инерционных сил, требуют задания матриц коэффициентов настройки.
Обращает внимание, что ряд подходов к синтезу алгоритмов управления , например, метод функций Ляпунова, не позволяет полностью формализовать процесс построения СУ МР. Кроме того, оптимальные по быстродействию траекторные регуляторы требуют включения в их структуру блоков аппроксимации, блоков решения обратной задачи кинематики и интерполяции, блоков формирования кривой максимальной скорости, что привносит дополнительную погрешность управления приводами исполнительных механизмов, а, следовательно, и в отработку спланированных траекторий. Включение дополнительных блоков в структуру СУ неизбежно приводит к снижению надежности замкнутой системы в целом, повышению требований к аппаратной части СУ МР и, как следствие, к повышению стоимости всего РТК.
Значительный вклад в решение проблемы синтеза оптимальных управлений внесли известные ученые: Kahn M. E., Roth B., Bobrow J. E., Dubowsky S., Gibson J. S. [1, 2] и ряд других отечественных и зарубежных ученых. Наиболее эффективный подход к решению данной проблемы был предложен В.Х. Пшихоповым, разработавшим аналитический алгоритм оптимального по быстродействию управления, который позволяет организовать движение рабочего органа МР вдоль заданных траекторий с максимальной траекторной скоростью [3] . Однако возникают трудности при практической реализации данного подхода для траекторий, отличных от единичной окружности, связанные со сложностью нахождения в аналитическом виде функции кривой максимальной скорости (КМС), наличием матриц коэффициентов настройки, а также необходимостью вычисления производных от функции КМС и матриц Якоби. При этом потребляется до 15% вычислительных ресурсов СУ МР.
Таким образом, необходимо разработать аналитические оптимальные по быстродействию алгоритмы позиционно-траекторного управления , позволяющие повысить надёжность РТК и точность работы МР за счёт снижения вычислительной сложности алгоритмов управления и возможности учёта нелинейных свойств манипулятора.
Задача оптимального по быстродействию управления МР ставится следующим образом. Пусть математическая модель динамики МР в форме Коши задана системой
 (1)
(1)
где ![]() ,
, ![]() – векторы переменных координат состояния, соответствующие обобщённым координатам и скоростям размерности
n
х1;
– векторы переменных координат состояния, соответствующие обобщённым координатам и скоростям размерности
n
х1; ![]() – вектор управляющих воздействий размерности
n
х1;
– вектор управляющих воздействий размерности
n
х1; ![]() – вектор функций переменных состояния размерности
n
х1;
– вектор функций переменных состояния размерности
n
х1; ![]() – матрица функциональных коэффициентов размерности n х n ; Ф(
x
2
n
-1
) – оператор перехода из пространства
R
n
в пространство
R
m
;
Р
– вектор внешних координат;
n
– число степеней подвижности МР.
– матрица функциональных коэффициентов размерности n х n ; Ф(
x
2
n
-1
) – оператор перехода из пространства
R
n
в пространство
R
m
;
Р
– вектор внешних координат;
n
– число степеней подвижности МР.
Пусть желаемые траектории движения задаются в пространстве R m внешних координат или в пространстве R n обобщённых координат. Функционал или критерий качества определим в виде
 , (2)
, (2)
где t 0 – начальный момент времени, t s – конечный момент времени.
Итак, требуется разработать алгоритм оптимального по быстродействию управления МР, который
удовлетворяет ограничениям ![]() ,
, ![]() ,
, ![]() , переводит рабочий орган МР из заданного начального состояния
x
2
n
(
t
0
)
,
x
2
n
-
1
(
t
0
)
в заданное конечное состояние
x
2
n
(
t
s
)
,
x
2
n
-
1
(
t
s
), минимизирует функционал
J
(
u
) (2) и устраняет недостатки существующих методов управления манипуляторами.
, переводит рабочий орган МР из заданного начального состояния
x
2
n
(
t
0
)
,
x
2
n
-
1
(
t
0
)
в заданное конечное состояние
x
2
n
(
t
s
)
,
x
2
n
-
1
(
t
s
), минимизирует функционал
J
(
u
) (2) и устраняет недостатки существующих методов управления манипуляторами.
Известно, что задача оптимального по быстродействию позиционного управления, позволяющего оптимизировать такие технологические операции, как точечная сварка, дозаправка, обезвреживание взрывных устройств, отбор проб, управление системой наведения и т. д, заключается в перемещении рабочего органа МР из некоторой начальной точки фазового пространства в заданную точку (целевое положение) того же пространства за минимальное время. Пусть целевое положение рабочего органа МР задаётся в пространстве R n обобщённых координат.
Сформируем целевое многообразие рабочего органа МР
![]() . (3)
. (3)
При этом желаемая скорость движения рабочего органа МР определяется выражением
![]() . (4)
. (4)
Линейная комбинация многообразий (3) и (4) определяет агрегированную макропеременную
![]() (5)
(5)
где
R
>
0
,
![]() –
диагонально определённо положительная матрица коэффициентов настройки. Требование асимптотической устойчивости в целом фазовой траектории (5), отражающей требования к установившемуся режиму МР, может быть задано предельным дифференциальным уравнением вида
–
диагонально определённо положительная матрица коэффициентов настройки. Требование асимптотической устойчивости в целом фазовой траектории (5), отражающей требования к установившемуся режиму МР, может быть задано предельным дифференциальным уравнением вида
![]() , (6)
, (6)
где
T
>0, ![]() – матрица задаваемых коэффициентов, определяющая характер движения рабочего органа МР во всём фазовом пространстве внешних или обобщённых координат. Предельное функциональное уравнение (6) также асимптотически устойчиво в целом для всего пространства состояний, кроме многообразия
– матрица задаваемых коэффициентов, определяющая характер движения рабочего органа МР во всём фазовом пространстве внешних или обобщённых координат. Предельное функциональное уравнение (6) также асимптотически устойчиво в целом для всего пространства состояний, кроме многообразия ![]() .
.
Подставив выражения (3) – (5) в уравнение (6), получим
![]() .
(7)
.
(7)
Учитывая уравнение МР (1) и решив уравнение (7) относительно вектора управлений, получим
![]() . (8)
. (8)
В пределе, при ![]() алгоритм управления МР (8) имеет следующий вид:
алгоритм управления МР (8) имеет следующий вид:
![]() . (9)
. (9)
Так как большинство роботизированных технологических операций используют траекторное управление движением рабочего органа МР, т.е. движение по заданной траектории (сварка, разметка, окраска, нанесение покрытий и т. д.). Цель синтеза оптимальной по быстродействию траекторной СУ состоит в определении такого управления ![]() , которое переводит МР из произвольного состояния в окрестность задаваемого многообразия
, которое переводит МР из произвольного состояния в окрестность задаваемого многообразия
 , (11)
, (11)
а затем обеспечивает дальнейшее его движение вдоль него с максимальной скоростью. Представляя матрицу управления ![]() в фазовом пространстве
R
l
в виде
в фазовом пространстве
R
l
в виде ![]() , был получен закон траекторного оптимального по быстродействию управления МР
, был получен закон траекторного оптимального по быстродействию управления МР
![]() , (12)
, (12)
где ![]() ,
, ![]() ,
, ![]() ,
,  ,
, ![]() ,
, ![]() ,
,  , 0
2
– нулевой вектор размерности
, 0
2
– нулевой вектор размерности ![]() .
.
При этом желаемые траектории движения рабочего органа МР, определяемые требованиями технологической задачи, задаются, как в виде квадратичных форм координат пространства внешних координат R m [3], так и в неявном виде.
Пример. Рассмотрим управление двухзвенным МР, который описывается моделью (1), где
 ,
,  .
.
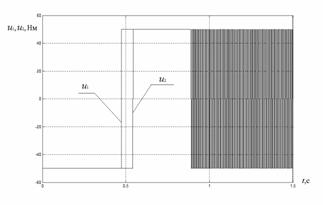
Пусть ограничения на управления имеют вид ![]() Н·м.
Графики управляющих моментов, представленные на рис. 1
, удовлетворяют требованиям известных теорем [4].
Н·м.
Графики управляющих моментов, представленные на рис. 1
, удовлетворяют требованиям известных теорем [4].
|
|
|
|
а) при оптимальном по быстродействию позиционном управлении |
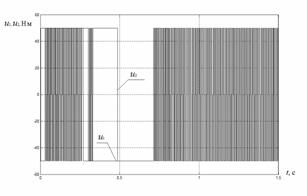
б) при оптимальном по быстродействию траекторном управлении |
|
Рис. 1 . Графики управляющих моментов двухзвенного МР |
|
|
|
|
|
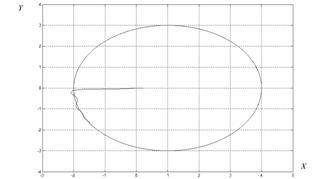
Рис. 2 . График траектории движения рабочего органа двухзвенного МР |
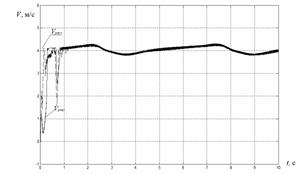
Рис. 3 . Графики изменения траекторных скоростей рабочего органа МР |
Разработанный универсальный аналитический метод синтеза оптимальных по быстродействию позиционных нелинейных регуляторов многозвенными МР увеличить производительность манипулятора, обеспечивая при этом высокую точность позиционирования. В отличие от известных подходов, разработанный метод траекторного оптимального по быстродействию управления МР не требует формирования КМС и вычисления частных производных от функции максимальной скорости, при этом учитываются реальные параметры звеньев МР, что даёт возможность обеспечить точное отслеживание быстрых траекторий. Рост производительности по сравнению с алгоритмом, приведённым в [3], таким образом, составляет 7–10 %.
Список использованных источников:
1. Kahn M.E. The Near – Minimum Time Control of Open Loop Articulated Kinematic Chains / M.E. Kahn, B. Roth // Journal of Dynamic Systems, Measurement and Control. – 1971. – №93. – P. 164–172.
2. Bobrow J.E. Time-optimal control of robotic manipulators along specified paths / J.E. Bobrow, S. Dubowsky, J.S. Gibson // Int. Journal Robotic Research. – 1985. – №4(3). – P . 3–17.
3. Пшихопов В.Х . Оптимальное по быстродействию траекторное управление электромеханическими манипуляционными роботами / В.Х. Пшихопов // Известие вузов. Электромеханика. – 2007. – №1. – С. 51–57.
4. Chen Y. On the Structure of the Time-optimal Controls for Robotic Manipulators / Y. Chen // IEEE Transactions on Automatic Control. –1989. – №1. – P. 115–116.