Д. т. н. Щербань И. В., Толмачев С. А., Гайбарян А. Х.
Южный Федеральный университет, г . Ростов-на-Дону, Российская Федерация
ДВУХКОНТУРНЫЙ НАВИГАЦИОННЫЙ АЛГОРИТМ ДЛЯ КОМПЛЕКСИРОВАННОЙ СИСТЕМЫ БИНС/GPS АВТОМОБИЛЯ
К числу основных современных бортовых систем навигации относят прежде всего инерциальные навигационные системы (ИНС) и спутниковые навигационные системы (СНС). Опыт эксплуатации этих систем применительно к автомобильной технике показал, что при многих их достоинствах каждая из систем по отдельности не удовлетворяет всем, предъявляемым на сегодняшний день качественным требованиям. Так, в ажнейшей особенностью измерений СНС является их дискретный характер. Это, в свою очередь, существенно затрудняет условие непрерывности наблюдений за навигационными параметрами объекта. И спользование же в автономном режиме относительно дешевых ИНС, реализуемых на грубых MEMS-датчиках, не позволяет определять навигационные параметры автомобиля с достаточной точностью. Поэтому достижение требуемого качества навигационных систем чаще всего обеспечивается посредством комплексирования ИНС, построенных на основе MEMS-технологий, со спутниковыми навигационными системами ГЛОНАСС/GPS [1].
Существующие подходы к подобной тесной интеграции ИНС и СНС для автомобильных транспортных средств (ТС) неэффективны. Это связано с методическими погрешностями существующего математического аппарата, который использует только линеаризованные измерения СНС и линейные уравнения ошибок ИНС, устойчивых лишь на небольших интервалах времени [2]. Поэтому применительно к ТС разработан эффективный в вычислительном плане алгоритм решения навигационной задачи, не требующий использования калмановской фильтрации.
Используется полная нелинейная модель навигационной системы ТС и, поэтому, решение справедливо для произвольного и неизвестного заранее характера движения автомобиля, причем, при самых общих предположениях об уровне действующих возмущений. Кроме того, рассмотренное решение является универсальным для любого состава датчиков БИНС, включающего в общем случае как инерциальные, так и неинерциальные измерители любого класса точности и, соответственно, стоимости.
Алгоритм решения навигационной задачи (представлен на рис . 1 ) содержит два контура – быстрый, где автономно выполняется решение навигационной задачи БИНС, и медленный, где по показаниям СНС осуществляется коррекция решений БИНС и определяются начальные условия для первого такта последующего итерационного цикла быстрого контура.
Такт работы медленного контура
![]() , (1)
, (1)
равен интервалу времени получения навигационных сообщений СНС. Здесь T 0 – такт работы быстрого контура; k м >1 – коэффициент, определяемый из трудоемкости задач и производительности бортового вычислителя ТС.
В быстром контуре выполняется
k
м
итерационных циклов решения навигационной задачи БИНС, где вычисляются текущие значения координат ТС j , l и
h
, восточная ![]() , северная
, северная ![]() и вертикальная
и вертикальная ![]() составляющие линейной скорости ТС относительно Земли, а также углы пространственной ориентации ТС
K
, q и y – курса, продольных и боковых наклонов соответственно.
составляющие линейной скорости ТС относительно Земли, а также углы пространственной ориентации ТС
K
, q и y – курса, продольных и боковых наклонов соответственно.
В медленном контуре выполняются преобразования систем координат и учтено допущение, что ТС может совершать движение только по дорогам, координаты которых отражены в навигационных цифровых картах. Также, учтен тот факт, что может иметь неконтролируемое и никак не опознаваемое существенное ухудшение точности работы СНС, для чего и выполняется прогноз местоположения ТС на автомобильной дороге.
Решение задачи идентификации на основе минимизации невязок осуществляется в статистической апостериорной постановке – по результатам полученных наборов измерений относительно базового решения. Рассмотренный алгоритм решения навигационной задачи ТС эффективен в вычислительном плане, так как не требует использования калмановской фильтрации. В то же время, использование двуконтурной итерационной схемы позволяет избежать накопления ошибок интегрирования и увеличения погрешностей местоположения ТС со временем. Как показало моделирование, обеспечивается достаточная – субметровая , точность решения навигационной задачи.
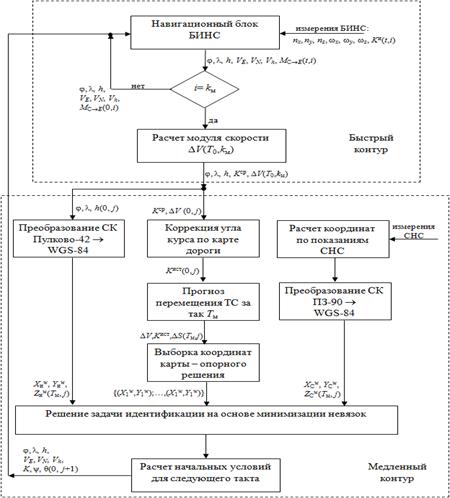
Рис . 1. Функциональная схема комплексированной навигационной системы
Список использованных источников:
1. Демидов О. В. Задача тесной интеграции систем ГЛОНАСС и GPS с ИНС разных классов точности: Дисс . на соиск . степ . к . ф.-м. н. / О. В. Демидов. – М.: МГУ, 2009.
2. Голован А. А. Математические основы навигационных систем. Ч. 1.: Математические модели инерциальной навигации / А. А. Голован, Н. А. Парусников. – 2-е изд . – М.: МГУ, 2010. – 126 с .