Д. т. н. Рогоза В. С., Сергеев-Горчинский А. А.
УНК «Институт Прикладного Системного Анализа» НТУУ «КПИ», г. Киев, Украина
ОЦЕНКА ВЛИЯНИЯ ИНТЕРПОЛЯЦИИ СИГНАЛА НА ЗАДЕРЖКУ ВОЗНИКАЮЩУЮ ПРИ ЕГО СГЛАЖИВАНИИ
В статье проведена оценка влияния интерполяции сигнала на задержку, которая возникает при его сглаживании. Данные, подлежащие сглаживанию, были получены с помощью разработанного программного пакета, включающего регистрирование исходного сигнала, его интерполяцию и последующее сглаживание. Целью исследования было определение возможности сокращения времени сбора данных для сглаживания при помощи интерполяции начальной выборки.
Ключевые слова : сигнал, интерполяция, сглаживание, задержка.
Введение. Большинство современных мобильных устройств оснащены датчиками, которые расширяют область применения последних. В ряде приложений используются датчики (акселерометры) для регистрации ускорения частей тела человека и оценки состояния его здоровья. С помощью акселерометров могут фиксироваться такие ситуации, как падение, для пожилых людей [1], чрезмерная активность для людей с нарушением концентрации сахара в крови [2], резкие изменения положения тела, нежелательные для людей с повышенным артериальным давлением, и т. д.
Важным в таких задачах является точное определение ускорения тела, поскольку от этого зависит, насколько точным будет прогноз состояния человека. Часто сигналы, которые описывают заданный процесс, имеют высокую частоту, что обуславливает сложность их регистрации и анализа. Регистрируемый сигнал, как правило, представляет сумму воздействий различных источников, обычно это модулирующий сигнал и случайный сигнал (шум). При низком уровне аппаратной дискретизации, соотношение этих сигналов становится соизмеримо равным, что затрудняет выделение модулирующего сигнала.
Перед анализом исходного временного ряда, его стараются очистить от случайной составляющей, для этого к исходному сигналу применяют методы фильтрации и сглаживания.
Для анализа были взяты значения сигналов, снятых с акселерометра во время ходьбы человека. Акселерометр был зафиксирован на груди и регистрировал линейное ускорение телефона по одной из заданных осей (по оси Y). Значения ускорения описывали гармоническое колебание в сумме с вибрационным откликом и внешними помехами.
Выделение гармонических колебаний может быть реализовано с помощью методов сглаживания, к которым относятся: метод «скользящее среднее», медианное сглаживание, экспоненциальное сглаживание, «фильтр» Кальмана. В статье для выделения гармонических колебаний, был использован метод «скользящее среднее».
Формула расчета метода «скользящее среднее» («простое скользящее среднее», ПСС) [3]:
 , (1)
, (1)
где x ( t ) – значение исходного сигнала в момент времени t , x '( t ) – сглаженное значение в момент времени t , n – количество предыдущих исходных замеров участвующих при сглаживании.
Метод «скользящее среднее» позволяет сохранить частоту сигнала, при этом происходит уменьшение амплитуды значений и возникает задержка по времени.
Постановка проблемы. Мобильные устройства (бюджетные модели) имеют ограниченную (низкую) частоту дискретизации, позволяющую лишь частично воспроизвести поведение аналогового сигнала, снимаемого с датчика. Как правило, это связано с аппаратными ограничениями регистрирующего элемента, в том числе с ограничениями по энергопотреблению.
Поскольку низкая частота дискретизации сокращает объём информации, для алгоритма расчета оптимального параметра сглаживания ( см . формулу 1, значение n ), обычно требуется выборка, включающая 3 и более периодов исходного сигнала.
На рис. 1 изображены значения линейного ускорения по оси Y, полученные при ходьбе человека со скоростью 3.708 (км/час).
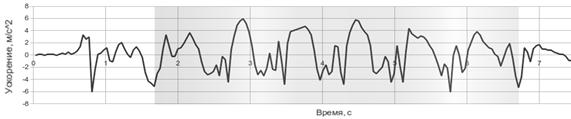
Рис. 1. Значения линейного ускорения при ходьбе со скоростью
1.032 (м/ c ) = 3.708 (км/час) (6 контрольных шагов)
В результате оценивания значений ускорения, изображенных на рис. 1, был найден оптимальный параметр метода скользящее среднее (равный 9). Сглаженный временной ряд изображен на рис. 2.
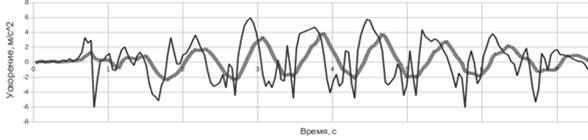
Рис. 2. Сглаженные значения линейного ускорения при ходьбе со скоростью
1.032 (м/ c ) = 3.708 (км/час) (6 контрольных шагов)
На мобильном устройстве, участвующем в эксперименте, при движении со скоростью 1.032 (м/ c ) частота дискретизации была равна 25 Гц.
При этом для нахождения оптимального значения параметра сглаживания потребовалось 100 начальных замеров, что включило начало движения и три шага. Из рис. 2 видно, что оптимально сгладить исходный временной ряд получилось лишь с задержкой по времени (в среднем на 0.4 (с) ) .
Для сокращения времени необходимого на сбор данных для сглаживания, было предложено интерполировать часть начальных значений.
Далее будет проведена оценка сглаживания для временного ряда, полученного при интерполяции исходных данных.
Описание эксперимента. Было выбрано два последовательных интервала значений исходного временного ряда для интерполирования ( см . рис. 3, 4). Для расширения исходной выборки, дискретизация сигнала была увеличена от 25 Гц до 100 Гц.
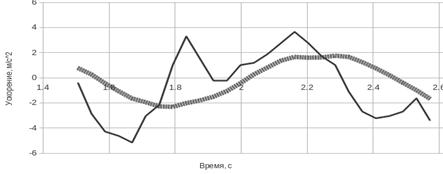
Рис. 3. Исходный временной ряд и результат сглаживания,
в моменты времени 1.506 (с) – 2.572 (с)
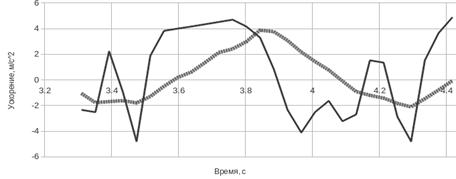
Рис. 4. Исходный временной ряд и результат сглаживания,
в моменты времени 3.31 (с) – 4.417 (с)
Исходные данные были интерполированы с помощью трех функций: константы (равной последнему значению), линейной функции двух ближайших значений, сплайн-функции двух ближайших значений.
Интерполированные временные ряды были сглажены с помощью метода скользящее среднее.
На рис. 5, 6 изображены интерполированный и сглаженный временные ряды для исходных значений изображенных на рис. 3.
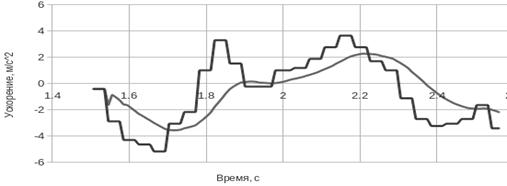
Рис. 5. Константно-интерполированный сигнал и сглаженный сигнал
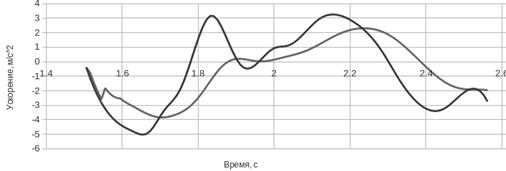
Рис. 6. Сплайн-интерполированный сигнал и сглаженный сигнал
Поскольку сглаженные значения подобны для всех методов интерполяции, на рис. 5 и 6, было изображено сглаживание только константно-интерполированного и сплайн-интерполированного временных рядов. При этом получилось сократить отставание сглаженного сигнала (по времени) на 0.225 (с), в два раза по сравнению со сглаживанием без интерполирования (0.5 (с) ) .
На рис. 7, 8 изображены интерполированный и сглаженный временные ряды для исходных значений, изображенных на рис. 4.
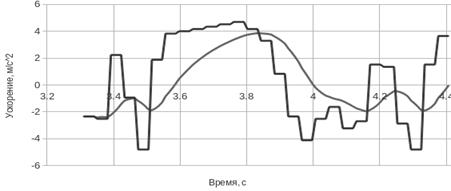
Рис. 7. Константно-интерполированный сигнал и сглаженный сигнал
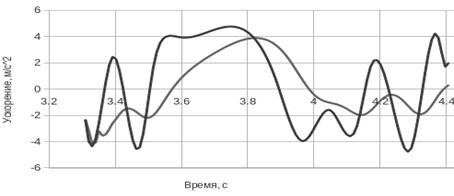
Рис. 8. Сплайн-интерполированный сигнал и сглаженный сигнал
Так же, как и для рис . 5, 6, сглаженные значения подобны для всех методов интерполяции. При этом получилось сократить отставание сглаженного сигнала (по времени) на 0.149 (с), в два раза по сравнению со сглаживанием без интерполяции ( 0.3 (с) ) .
Выводы. Основанием для написания статьи послужил эксперимент, в котором была проверена возможность сокращения времени сбора данных при помощи интерполяции данных снятых с датчика акселерометр во время ходьбы человека. Исходные данные были интерполированы при помощи трех методов (константы, линейной функции и сплайн-функции ). Для всех типов интерполяции качество сглаживания было подобным, это позволяет в дальнейшем остановиться на константной интерполяции.
Интерполяция позволила получить выигрыш по двум значениям: количеству данных необходимых для поиска оптимального параметра сглаживания (метода «скользящее среднее») и времени на которое сглаженный сигнал запаздывает относительно исходного сигнала (отставание было сокращено в два раза).
Поскольку время которое необходимо на сбор начальной выборки, и задержка сглаженного сигнала представляют проблему, которая обычно имеет частное решение, положительный результат, полученный в описанном эксперименте, требует более детального изучения подхода сглаживания, основанного на интерполировании значений начальной выборки.
Список использованных источников :
1. Bourke A. K., Evaluation of a threshold-based tri-axial accelerometer fall detection algorithm / A. Bourke, J. O'Brien and G. Lyons // Gait and Posture . – vol. 26 . – 2007. – pp. 194 – 199 .
2. Matsumura T. Device for Measuring Real-time Energy Expenditure by Heart Rate and Acceleration for Diabetic Patients / T. Matsumura, V. T. Chemmalil , M. L. Gray, J. E. Keating, R. L. Kieselbach // Annual Northeast Bioengineering Conference 35 th . – Boston, 2009. – pp. 1 – 2 .
3. Wang D. Compared performances of morphological, median type and running mean filters / D. Wang, J. Ronsin , V. Haese -Coat // SPIE, vol. 1818, Visual Communications and Image Processing . – 1992. – pp. 384 – 391 .