К. т. н. Будаш ко В. В.
Одеська національна морська академія, Україна
ПАРАМЕТРИЗАЦІЯ ПОТУЖНИХ ЕЛЕКТРИЧНИХ МАШИН ПРИ МОДЕЛЮВАННІ СУДНОВИХ ПРОПУЛЬСИВНИХ КОМПЛЕКСІВ
Під час моделювання суднових комбінованих пропульсивних комплексів (СКПК) стає проблема визначення параметрів схеми заміщення потужних синхронних машин (СМ). Із бібліотеки Simulink є можливість вибрати модель окремого СМ з конкретними даними, які неможливо перерахувати, не маючі у наявності деяких даних, таких наприклад, як: сумарний момент інерції ротора і навантаження,коефіцієнт в'язкого тертя ротора і навантаження,кут положення ротора тощо, методика розрахунку яких не наводиться, а знайти паспортні дані СМ є істотною проблемою [1].
З іншого боку СКПК теперечки досить стрімко розвиваються і, таким чином, їх дослідження є актуальною задачею, яку не можливо вирішити без адекватним математичних моделей [2, c. 8].
У даній статті наведено приклад ітераційного розрахунку параметрів схем заміщення (СМ) математичної моделі суднової енергетичної установки (СЕУ) встановленою потужністю 60 МВА СКПК човникового танкеру льодового району плавання [3, c. 78].
У якості базисних було обрано параметри схеми заміщення СМ стандартних Simulink моделей: синхронного генератора (СГ) номінальною потужністю Р n = 3,125 МВА , номінальною лінійною напругою на обмотці статору U n = 2400В, частотою мережі f = 60 Гц та частотою обертання ротору n n = 1800 об/хв. та визначено коефіцієнт пропорційності kp для подальшого перерахунку необхідних параметрів схеми заміщення:
![]() ,
(1)
,
(1)
де k 1 , k 2 – коефіцієнти пропорційності, які враховують змину живлючої напруги та потужності відносно базисних величин.
Величини опорів визначаємо з урахуванням коефіцієнту kp , а величин інерції H та постійної часу Td ′ з урахування його зворотного значення – 1/ kp .
Після першого ітераційного розрахунку здійснюється ініціалізація одного СГ [4, c. 113], підключеного на активно-індуктивне навантаження завбільшки у 20% від потужності СГ.Далі , зібравши схему головного розподільного щиту (ГРЩ) із чотирьох паралельно працюючих СГ, робимо повторну ініціалізацію з підключеним до шин 20% від загальної потужності СГ активно-індуктивним навантаженням. Осцилограми характеристик одного з чотирьох СГ ( Р n = 6 МВА , U n = 11000 В, f = 60 Гц, n n = 900 об/хв.) наведено на рис. 1.
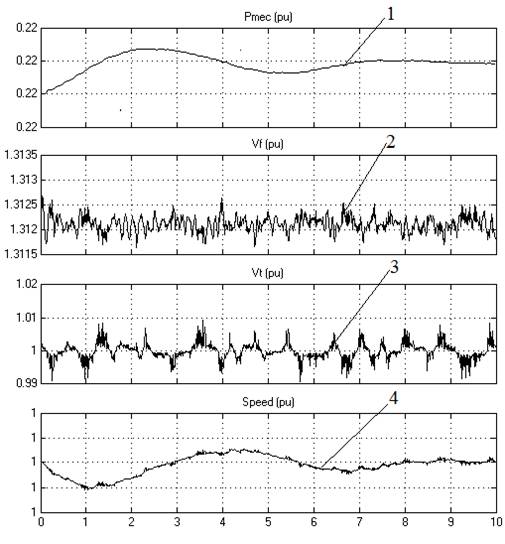
Рис. 1. Осцилограми характеристик СГ у в.о . :
1 – механічна потужність на валу; 2 – завдання частоти обертання, 3 – завдання подачі палива, 4 – частота обертання ротору
Наступним ітераційним кроком процесу параметризації була оптимізація параметрів СГ за допомогою б локу SignalConstraint , який було підключено для виміру завдання напруги збудження. Величини індуктивних опорів обмоток задавалися у діапазоні 0 ÷ 5 Ом, інерція – 0 ÷ 10, постіні часу – 0 ÷ 10, діапазон зміни параметру оптимізації задавався у межах ± 5% від 1, термін оптимізації – 5 сек.
На рис . 2 показано осцилограми оптимізованих характеристик СГ.
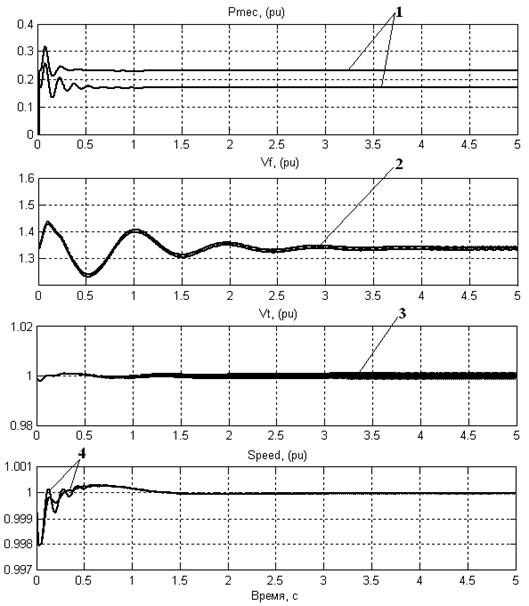
Рис. 2. Осцилограми характеристик СГ у в. о. після оптимізації для 20 та 30% навантаженні : 1 – механічна потужність на валу; 2 – завдання частоти обертання,
3 – завдання подачі палива, 4 – частота обертання ротору.
Значення параметрів СГ після оптимізації:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Осцилограми напруги на шинах ГРЩ показані на рис. 3.
Рис. 3. Осцилограма напруги на шинах ГРЩ після оптимізації параметрів СГ
Подальші дослідження відбуваються у напрямку розробки m -файлів для автоматичного розрахунку параметрів СМ при зміні заданої потужності та напруги живлення.
Список використаних джерел:
1. Будашко В. В. Оптимизация управления энергетической установкой типа CRP AZIPOD® / В. В. Будашко // Автомат изация судовых технических средств : научно-тех нический сборник . – 2008. – Вып . 14. – О . : ОНМА. – 116 с.
2. Черных И. В. SimPowerSystems Моделирование электротехнических устройств и систем в Simulink [Електронний ресурс] / И. В. Черных . – Режим доступу: http:// www . matlab.exponenta.ru/simpower/book1/1_7.php
3. Ådnanes A. K. Maritime Electrical Installation sand Diesel Electric Propulsion , Textbook / A. K. Ådnanes . – Oslo : ABBMarine AS, 2003. – 86 p .
4. Логвіненко К. С. Моделювання електротехнічних систем та їх елементів в пакеті MATLAB: навч . посіб . / К. С. Логвіненко . – О.: ОНМА, 2009. – 137 с.