Д. т. н. Будаи Б. Т., Снегин К. А.
Уральский федеральный университет, г. Екатеринбург, Российская Федерация
ВЫБОР ЭФФЕКТИВНЫХ КРИТЕРИЕВ СИНТЕЗА ФИЛЬТРОВ
В прошлом веке при синтезе фильтров исходили из критерия реализуемости фильтров. В настоящее время в связи с развитием цифровой техники возможно создание фильтров, которые могут быть синтезированы почти без ограничений на реализуемость. При этом оказывается, что многие общеизвестные критерии синтеза фильтров, эффективные при решении одних задач, оказываются малоэффективны при решении других задач, и наоборот. Это вызывает необходимость выбора эффективных критериев синтеза, соответствующих конкретным задачам фильтрации.
Изначально в приемнике
![]() принимали сигналы от объекта
принимали сигналы от объекта
![]() :
:
![]() . Однако затем возникли задачи выделения сигнала
. Однако затем возникли задачи выделения сигнала
![]() из аддитивной смеси сигнала
из аддитивной смеси сигнала
![]() , помехи
, помехи
![]() и шума
и шума
![]() [1; 2]
[1; 2]
![]() . (1)
. (1)
На рис. 1 показаны типовые спектры сигнала
![]() (штриховая линия), помехи
(штриховая линия), помехи
![]() (пунктирная линия) и шума
(пунктирная линия) и шума
![]() (штрих-пунктирная линия).
(штрих-пунктирная линия).
На рис. 2 представлен пример реализации смеси
![]() (1) колоколообразного сигнала от объекта
(1) колоколообразного сигнала от объекта
![]() с центром в точке
с центром в точке
![]() и медленно изменяющейся помехи
и медленно изменяющейся помехи
![]() с перегибом в точке
с перегибом в точке
![]() . Задачи выделения сигнала из смеси с помехой можно разделить на задачи линейной и нелинейной фильтрации.
. Задачи выделения сигнала из смеси с помехой можно разделить на задачи линейной и нелинейной фильтрации.
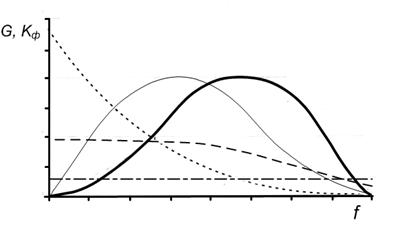
Рис. 1. Спектры сигналов и помех. Коэффициенты передачи
типовых линейных фильтров
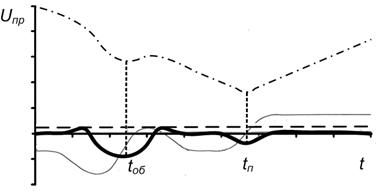
Рис. 2. Устранение еоднозначностипри обнаружении сигнала
Сущность нелинейной фильтрации заключается в том, что сигнал от объекта наиболее вероятно находится в центре плотности распределения смеси (1).Тогда растяжение динамического диапазона смеси до равномерной плотности распределения должно приводить к увеличению контраста сигнала от объекта и к уменьшению контраста от помехи, то есть к повышению отношения сигнал/помеха [3]. Однако в достаточно распространенном случае коррелированной помехи, от объекта
![]() с центром в точке
с центром в точке
![]() и медленно изменяющейся помехи
и медленно изменяющейся помехи
![]() с перегибом в точке
с перегибом в точке
![]() . Задачи выделения сигнала из смеси с помехой можно разделить на рассмотренном на рис.2, смесь (1) изначально имеет распределение, близкое к равномерному. Поэтому такая фильтрация практически не изменит изначальную смесь (1).
. Задачи выделения сигнала из смеси с помехой можно разделить на рассмотренном на рис.2, смесь (1) изначально имеет распределение, близкое к равномерному. Поэтому такая фильтрация практически не изменит изначальную смесь (1).
Линейную фильтрацию с учетом [3, с. 88] можно представить в виде
![]() , (2)
, (2)
где
![]() импульсная характеристика (ИХ) фильтра
импульсная характеристика (ИХ) фильтра
![]() . Изначально применяли фильтры, которые наиболее просто реализуются а налоговым способом. Например [2]
. Изначально применяли фильтры, которые наиболее просто реализуются а налоговым способом. Например [2]
 (3)
(3)
где
![]() параметр фильтрации, определяемый длительностью сигнала. ИХ (3) обеспечивает формирование усредненной первой производной [2]. На рис. 2 тонкой линией представлена оценка
параметр фильтрации, определяемый длительностью сигнала. ИХ (3) обеспечивает формирование усредненной первой производной [2]. На рис. 2 тонкой линией представлена оценка
![]() (2) c ИХ (3). При применении такой фильтрации (3) оценка координаты объекта
(2) c ИХ (3). При применении такой фильтрации (3) оценка координаты объекта
![]() определяется как момент времени смены знака оценка
определяется как момент времени смены знака оценка
![]() с отрицательного на положительный при условии, что в окрестности оценки
с отрицательного на положительный при условии, что в окрестности оценки
![]() оценка сигнала выше порогового уровня
оценка сигнала выше порогового уровня
![]() . На рис. 2 представлена ситуация, когда отклик от объекта
. На рис. 2 представлена ситуация, когда отклик от объекта
![]() не превышает порогового уровня
не превышает порогового уровня
![]() (штрих), в то время как сигналоподобный отклик
(штрих), в то время как сигналоподобный отклик
![]() превышает пороговый уровень в окрестности координаты перегиба сигналоподобной помехи
превышает пороговый уровень в окрестности координаты перегиба сигналоподобной помехи
![]() .
.
Для устранения неоднозначности при определении координаты
![]() и подавлении помех от местных предметов можно рассмотреть коэффициент передачи (КП) фильтра
и подавлении помех от местных предметов можно рассмотреть коэффициент передачи (КП) фильтра
![]() , оптимальный по критерию минимума среднеквадратической ошибки [3, c . 88] :
, оптимальный по критерию минимума среднеквадратической ошибки [3, c . 88] :
 . (4)
. (4)
Применение оптимального ФСЧ с КП (4) не представляется возможным вследствие бесконечного отклика ИХ и наличия дробных коэффициентов такой ИХ ФСЧ. Рассмотрим ФСЧ с ИХ
![]() , имеющий такую же шумовую полосу и такую же ограниченную длительность ИХ, что и ИХ традиционного ФСЧ (3)
, имеющий такую же шумовую полосу и такую же ограниченную длительность ИХ, что и ИХ традиционного ФСЧ (3)
 (5)
(5)
ФСЧ (2) с ИХ (5) обеспечивает устранение неоднозначности в оценке координаты
![]() , так как эта оценка определяется как минимум сигнала, независимо от количества переходов через «0» оценки
, так как эта оценка определяется как минимум сигнала, независимо от количества переходов через «0» оценки
![]() (2). На рис. 1 сплошными линиями показаны: коэффициент передачи ФСЧ с ИХ (3) (тонкая линия) и коэффициент передачи ФСЧ с ИХ (5) (толстая линия). Оказывается, что ФСЧ с ИХ (5) оказывается лучшей аппроксимацией оптимального фильтра (4), что и позволяет более эффективно подавлять помеху от местных предметов.
(2). На рис. 1 сплошными линиями показаны: коэффициент передачи ФСЧ с ИХ (3) (тонкая линия) и коэффициент передачи ФСЧ с ИХ (5) (толстая линия). Оказывается, что ФСЧ с ИХ (5) оказывается лучшей аппроксимацией оптимального фильтра (4), что и позволяет более эффективно подавлять помеху от местных предметов.
Таким образом, ФСЧ с ИХ (5) по сравнению ФСЧ с ИХ (3) обеспечивает большую эффективность при обнаружении сигнала. Однако этот факт не является гарантией того, что ФСЧ с ИХ (5) всегда эффективнее ФСЧ с ИХ (3). В подтверждение этому на рис. 3 представлены: исходное изображение котенка (рис. 3а); изображение котенка, отфильтрованное ФСЧ с ИХ (3) по горизонтали (рис. 3б); изображение котенка, отфильтрованное ФСЧ с ИХ (3) по вертикали (рис. 3в); изображение котенка, отфильтрованное ФСЧ с ИХ (5) по горизонтали и вертикали (рис. 3г). Применение каждого из вышеназванных фильтров выделяет разные характерные состояния котенка: улыбчивость, сосредоточенность, свирепость.
Подобные подходы к фильтрации эффективны, например, при попытке выделить изображения лиц людей, пытающихся совершить преступление: улыбчивый человек вряд ли намерен совершить преступление, в то время как чрезмерно сосредоточенный или свирепый более вероятно способен на такой шаг. Поэтому каждый из вышерассмотренных фильтров оказывается эффективен при решении своей задачи фильтрации.
Итак, традиционно в качестве основного критерия синтеза фильтров стояла задача реализуемости фильтров, выделяющих мелкие детали изображений на фоне коррелированных помех (рис. 1, рис. 2), что приводило к фильтрам с ИХ типа (3). Затем по мере развития цифровой техники в качестве основного критерия синтеза стала задача выделения мелких деталей по критерию минимума среднеквадратической ошибки фильтрации (4). При этом появились более эффективные аппроксимации этого фильтра в виде фильтров с ИХ типа (5) [2]. Но в настоящее время получается, что при решении новых задач традиционно считающиеся менее эффективными фильтры с ИХ (3) оказываются более эффективны, например, при выделении признаков «улыбчивости», «серьезности», чем традиционно считающиеся более эффективными фильтры с ИХ (5).
В связи с вышеизложенным, в настоящее время по мере уменьшения ограничений на реализуемость усложняются задачи фильтрации. При этом встают задачи сначала определения выделяемого признака или совокупности признаков сигнала, а только затем выбора одного или нескольких критериев синтеза фильтров.
Список использованных источников:
1. Программно-аппаратный комплекс автоматического управления РЛС сопровождения радиозонда: Тезисы доклада / [А. В. Гусев, В. Э. Иванов, О. В. Мироненко, Р. А. Петров] // Междун. конф. по проблемам и перспективам развития электросвязи в России и странах СНГ (МКПРЭС-1). – Екатеринбург, 1997.
3. Василенко Г. И. Восстановление изображений / Г. И. Василенко, А. М. Тараторин. – М.: Радио и связь, 1986. – 304 с.