Наши конференции
В данной секции Вы можете ознакомиться с материалами наших конференций
II МНПК "Спецпроект: анализ научных исследований"
II МНПК"Альянск наук: ученый ученому"
I Всеукраинская НПК"Образовательный процесс: взгляд изнутри"
II НПК"Социально-экономические реформы в контексте европейского выбора Украины"
III МНПК "Наука в информационном пространстве"
III МНПК "Спецпроект: анализ научных исследований"
I МНПК "Качество экономического развития"
III МНПК "Альянс наук: ученый- ученому"
IV МНПК "Социально-экономические реформы в контексте интеграционного выбора Украины"
I МНПК "Проблемы формирования новой экономики ХХI века"
IV МНПК "Наука в информационном пространстве"
II МНПК "Проблемы формирования новой экономики ХХI века"
I НПК "Язык и межкультурная коммуникация"
V МНПК "Наука в информационном пространстве"
II МНПК "Качество экономического развития"
IV МНПК "Спецпроект: анализ научных исследований"
ІІІ НПК "Образовательный процесс: взгляд изнутри"
VI МНПК "Социально-экономические реформы в контексте интеграционного выбора Украины"
МНПК «Проблемы формирования новой экономики ХХI века»
IV МНПК "Образовательный процесс: взгляд изнутри"
IV МНПК "Современные проблемы инновационного развития государства"
VI МНПК «Наука в информационном пространстве»
IV МНПК "Проблемы формирования новой экономики ХХI века"
II МНПК студентов, аспирантов и молодых ученых "ДЕНЬ НАУКИ"
VII МНРК "Социально-экономические реформы в контексте интеграционного выбора Украины"
VI МНПК "Спецпроект: анализ научных исследований"
VII МНПК "Наука в информационном пространстве"
II МНК "Теоретические и прикладные вопросы филологии"
VII МНПК "АЛЬЯНС НАУК: ученый - ученому"
IV МНПК "КАЧЕСТВО ЭКОНОМИЧЕСКОГО РАЗВИТИЯ: глобальные и локальные аспекты"
I МНПК «Финансовый механизм решения глобальных проблем: предотвращение экономических кризисов»
I Международная научно-практическая Интернет-конференция «Актуальные вопросы повышения конкурентоспособности государства, бизнеса и образования в современных экономических условиях»(Полтава, 14?15 февраля 2013г.)
I Международная научно-практическая конференция «Лингвокогнитология и языковые структуры» (Днепропетровск, 14-15 февраля 2013г.)
Региональная научно-методическая конференция для студентов, аспирантов, молодых учёных «Язык и мир: современные тенденции преподавания иностранных языков в высшей школе» (Днепродзержинск, 20-21 февраля 2013г.)
IV Международная научно-практическая конференция молодых ученых и студентов «Стратегия экономического развития стран в условиях глобализации» (Днепропетровск, 15-16 марта 2013г.)
VIII Международная научно-практическая Интернет-конференция «Альянс наук: ученый – ученому» (28–29 марта 2013г.)
Региональная студенческая научно-практическая конференция «Актуальные исследования в сфере социально-экономических, технических и естественных наук и новейших технологий» (Днепропетровск, 4?5 апреля 2013г.)
V Международная научно-практическая конференция «Проблемы и пути совершенствования экономического механизма предпринимательской деятельности» (Желтые Воды, 4?5 апреля 2013г.)
Всеукраинская научно-практическая конференция «Научно-методические подходы к преподаванию управленческих дисциплин в контексте требований рынка труда» (Днепропетровск, 11-12 апреля 2013г.)
VІ Всеукраинская научно-методическая конференция «Восточные славяне: история, язык, культура, перевод» (Днепродзержинск, 17-18 апреля 2013г.)
VIII Международная научно-практическая Интернет-конференция «Спецпроект: анализ научных исследований» (30–31 мая 2013г.)
Всеукраинская научно-практическая конференция «Актуальные проблемы преподавания иностранных языков для профессионального общения» (Днепропетровск, 7–8 июня 2013г.)
V Международная научно-практическая Интернет-конференция «Качество экономического развития: глобальные и локальные аспекты» (17–18 июня 2013г.)
IX Международная научно-практическая конференция «Наука в информационном пространстве» (10–11 октября 2013г.)
Лапутин Р.О., Степчук Д.В.
Автомобільно-дорожний інститут ДонНТУ , м. Горлівка
Система управління транспортними потоками на нерівнозначних перехрестях на одному рівні
За останні роки в Україні значно зросла кількість та тяжкість дорожньо-транспортних подій (ДТП). Це приводить до збільшення кількості травмованих та загиблих людей у ДТП, що спричиняє значний матеріальний збиток державі. З усіх ДТП, які трапляються на вулично-дорожній мережі (ВДМ) України, 70% припадає на ВДМ міст, з яких 75% ДТП відбувається на перехрестях на одному рівні [1], тому питання підвищення безпеки руху у вказаних місцях є актуальним.
В сучасних умовах для забезпечення безпеки руху на нерівнозначних нерегульованих перехрестях на одному рівні застосовуються наступні технічні засоби організації дорожнього руху (ТЗОДР): дорожні знаки (як правило, дорожні знаки пріоритету), дорожня розмітка та напрямні пристрої [2]. На зазначених перехрестях при наявності вказаних ТЗОДР та достатньо інтенсивного транспортного потоку головного напрямку, як правило, утворюються черги транспортних засобів на другорядному напрямку.
Для безпечного проїзду нерівнозначного нерегульованого перехрестя на одному рівні транспортними засобами другорядного напрямку необхідне одночасне виконання двох умов роз’їзду:
1) необхідна умова безпечного роз’їзду – наявність розриву в транспортному потоці головного напрямку;
2) достатня умова безпечного роз’їзду – розрив в транспортному потоці головного напрямку повинен дорівнювати як мінімум часу повного проїзду смуги руху транспортним засобом другорядного напрямку.
Таким чином, метою даної роботи є розробка системи управління транспортними потоками головного напрямку на нерівнозначних нерегульованих перехрестях на одному рівні, застосування якої дозволить штучно створювати наведені вище умови безпечного роз’їзду транспортних засобів другорядного напрямку.
В основу роботи системи, що пропонується, покладено штучне формування розриву в транспортному потоці головного напрямку на підходах до нерівнозначного нерегульованого перехрестя на одному рівні, шляхом зміни швидкісного режиму транспортних засобів цього потоку з метою безпечного роз’їзду автомобілів другорядного напрямку.
Схема системи наведена на рис. 1.
Порядок роботи системи, що пропонується, полягає у наступному:
- детектори транспорту 5, які встановлені на відстані 13 перед головним напрямком, фіксують транспортні засоби
![]() за деякий час
за деякий час
![]() , що рухаються по другорядному напрямку до перехрестя на одному рівні, інформація про які передається через електроз ’ єднання 9 на керуючий пристрій 12;
, що рухаються по другорядному напрямку до перехрестя на одному рівні, інформація про які передається через електроз ’ єднання 9 на керуючий пристрій 12;
- у випадку відсутності можливості безперешкодного проїзду перехрестя транспортні засоби
![]() зупиняються перед детектором транспорту 4 для пропуску транспортних засобів головного напрямку;
зупиняються перед детектором транспорту 4 для пропуску транспортних засобів головного напрямку;
- на відстанях
![]() та
та
![]() перед перехрестям на одному рівні по головним напрямкам встановлюються дорожні знаки 3 та
перед перехрестям на одному рівні по головним напрямкам встановлюються дорожні знаки 3 та
![]() змінної інформації, які обмежують максимальну швидкість руху. Вказані дорожні знаки встановлюються послідовно один за одним з метою поступової зміни швидкості руху без провокування попутних аварійних ситуацій у транспортному потоці головного напрямку;
змінної інформації, які обмежують максимальну швидкість руху. Вказані дорожні знаки встановлюються послідовно один за одним з метою поступової зміни швидкості руху без провокування попутних аварійних ситуацій у транспортному потоці головного напрямку;
- детектори транспорту 4 фіксують транспортні засоби другорядного напрямку
![]() , які роз’їжджаються на перехресті за час
, які роз’їжджаються на перехресті за час
![]() , якщо
, якщо
![]() ,
,
![]() , керуючий пристрій 12 змінює інформацію по електроз’єднанням 11 на дорожньому знаку 3 у бік зменшення швидкості;
, керуючий пристрій 12 змінює інформацію по електроз’єднанням 11 на дорожньому знаку 3 у бік зменшення швидкості;
- водій транспортного засобу 1 (рис.1.), який бачить зміну сигналу на дорожньому знаку 3 з
![]() до
до
![]() знижує швидкість до
знижує швидкість до
![]() , транспортні засоби, які рухаються попереду, продовжують рухатися зі швидкістю
, транспортні засоби, які рухаються попереду, продовжують рухатися зі швидкістю
![]() , в результаті чого, через різницю швидкостей руху транспортних засобів 1 і 2 в транспортному потоці формується початковий розрив
, в результаті чого, через різницю швидкостей руху транспортних засобів 1 і 2 в транспортному потоці формується початковий розрив
![]() необхідний водію для розпізнання інформації на дорожньому знаку
необхідний водію для розпізнання інформації на дорожньому знаку
![]() та вчасного прийняття відповідного до цієї інформації рішення;
та вчасного прийняття відповідного до цієї інформації рішення;
- через час
![]() , з моменту зміни інформації на дорожньому знаку 3, керуючий пристрій 12 змінює інформацію по електроз’єднанням 11 на дорожньому знаку
, з моменту зміни інформації на дорожньому знаку 3, керуючий пристрій 12 змінює інформацію по електроз’єднанням 11 на дорожньому знаку
![]() у бік зменшення швидкості з
у бік зменшення швидкості з
![]() до
до
![]() ;
;
- водій транспортного засобу
![]() , який бачить зміну сигналу дорожнього знаку
, який бачить зміну сигналу дорожнього знаку
![]() з
з
![]() до
до
![]() знижує швидкість з
знижує швидкість з
![]() до
до
![]() , транспортні засоби, які рухаються попереду, продовжують рухатися зі швидкістю
, транспортні засоби, які рухаються попереду, продовжують рухатися зі швидкістю
![]() , в результаті чого, через різницю швидкостей транспортних засобів 1 і 2 у транспортному потоці остаточно формується розрив
, в результаті чого, через різницю швидкостей транспортних засобів 1 і 2 у транспортному потоці остаточно формується розрив
![]() достатній для безпечного проїзду перехрестя транспортними засобами другорядного напрямку;
достатній для безпечного проїзду перехрестя транспортними засобами другорядного напрямку;
- при першому спрацьовуванні детектору транспорту 4 (початок роз’їзду черги) керуючий пристрій 12 змінить інформацію на дорожніх знаках 3 та
![]() відповідно з
відповідно з
![]() на
на
![]() та з
та з
![]() на
на
![]() ;
;
- якщо транспортні засоби другорядного напрямку продовжують прибувати до перехрестя й
![]() залишається позитивним, керуючий пристрій 12 змінить інформацію на дорожньому знаку 3 з
залишається позитивним, керуючий пристрій 12 змінить інформацію на дорожньому знаку 3 з
![]() на
на
![]() через
через
 (наступний цикл роботи системи), де
(наступний цикл роботи системи), де
![]() - відстань встановлення дорожнього знаку 3 перед дорожнім знаком
- відстань встановлення дорожнього знаку 3 перед дорожнім знаком
![]() ;
;
![]() - відстань встановлення дорожнього знаку
- відстань встановлення дорожнього знаку
![]() перед перехрестям на одному рівні;
перед перехрестям на одному рівні;
![]() - швидкість руху транспортних засобів після зміни інформації на дорожньому знаку 3 з
- швидкість руху транспортних засобів після зміни інформації на дорожньому знаку 3 з
![]() на
на
![]() ;
;
![]() - швидкість руху транспортних засобів після зміни інформації на дорожньому знаку
- швидкість руху транспортних засобів після зміни інформації на дорожньому знаку
![]() з
з
![]() на
на
![]() .
.
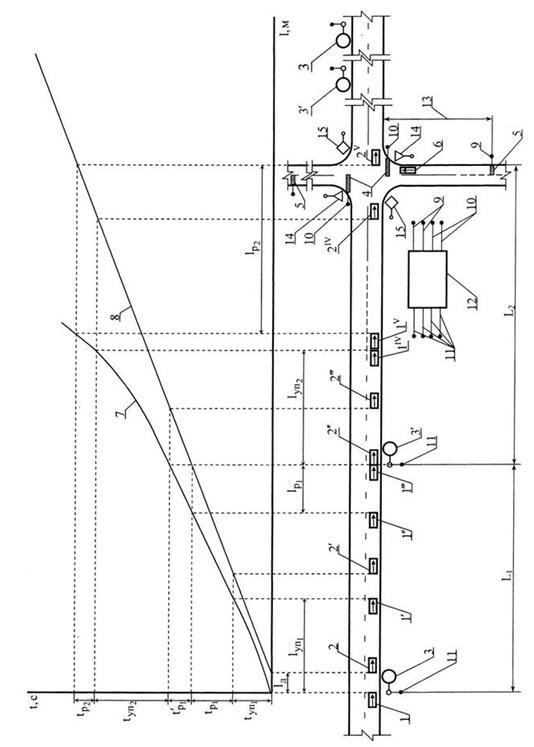
Рис. 1. Схема системи управління транспортними потоками на нерівнозначних нерегульованих перехрестях на одному рівні:
1, 2 – пара транспортних засобів, які рухаються по головному напрямку до перехрестя в момент зміни інформації про максимальну швидкість руху на дорожньому знаку 3;
![]() ,
,
![]() - положення пари транспортних засобів у момент виконання вимог дорожнього знаку 3 про зниження швидкості водієм 1-го транспортного засобу;
- положення пари транспортних засобів у момент виконання вимог дорожнього знаку 3 про зниження швидкості водієм 1-го транспортного засобу;
![]() ,
,
![]() - положення пари транспортних засобів у момент сформованого початкового розриву
- положення пари транспортних засобів у момент сформованого початкового розриву
![]() в транспортному потоці головного напрямку;
в транспортному потоці головного напрямку;
![]() ,
,
![]() - положення пари транспортних засобів у момент зміни інформації про максимальну швидкість руху на дорожньому знаку
- положення пари транспортних засобів у момент зміни інформації про максимальну швидкість руху на дорожньому знаку
![]() ;
;
![]() ,
,
![]() - положення пари транспортних засобів у момент виконання вимог дорожнього знаку
- положення пари транспортних засобів у момент виконання вимог дорожнього знаку
![]() про зниження швидкості водієм 1-го транспортного засобу;
про зниження швидкості водієм 1-го транспортного засобу;
![]() ,
,
![]() - положення пари транспортних засобів у момент сформованого необхідного для безпечного роз’їзду розриву
- положення пари транспортних засобів у момент сформованого необхідного для безпечного роз’їзду розриву
![]() в транспортному потоці головного напрямку; 3,
в транспортному потоці головного напрямку; 3,
![]() – дорожні знаки змінної інформації, які обмежують максимальну швидкість руху; 4, 5 – детектори транспорту, відповідно, транспорту другорядного напрямку, який безпосередньо здійснює роз’їзд на перехресті та транспорту, який під’їжджає до перехрестя; 6 – транспортний засіб, який рухається по другорядному напрямку; 7, 8 – графіки зміни швидкості руху пари транспортних засобів 1, 2; 9, 10, 11 – електроз ’ єднання, відповідно детекторів 4, 5 та дорожніх знаків змінної інформації 3,
– дорожні знаки змінної інформації, які обмежують максимальну швидкість руху; 4, 5 – детектори транспорту, відповідно, транспорту другорядного напрямку, який безпосередньо здійснює роз’їзд на перехресті та транспорту, який під’їжджає до перехрестя; 6 – транспортний засіб, який рухається по другорядному напрямку; 7, 8 – графіки зміни швидкості руху пари транспортних засобів 1, 2; 9, 10, 11 – електроз ’ єднання, відповідно детекторів 4, 5 та дорожніх знаків змінної інформації 3,
![]() ; 12 – керуючий пристрій; 13 – відстань між детекторами транспорту 4, 5; 14 – дорожній знак 2.1 "Дати дорогу"; 15 – дорожній знак "Головна дорога";
; 12 – керуючий пристрій; 13 – відстань між детекторами транспорту 4, 5; 14 – дорожній знак 2.1 "Дати дорогу"; 15 – дорожній знак "Головна дорога";
![]() - дистанція між парою транспортних засобів 1, 2 головного напрямку в момент увімкнення дорожнього знаку 3;
- дистанція між парою транспортних засобів 1, 2 головного напрямку в момент увімкнення дорожнього знаку 3;
![]() - шлях, який пройшов транспортний засіб 1 за час уповільнення
- шлях, який пройшов транспортний засіб 1 за час уповільнення
![]() у положення
у положення
![]() ;
;
![]() - початковий розрив в транспортному потоці головного напрямку, який дозволяє водію транспортного засобу 1 розпізнати інформацію на дорожньому знаку
- початковий розрив в транспортному потоці головного напрямку, який дозволяє водію транспортного засобу 1 розпізнати інформацію на дорожньому знаку
![]() та вчасно прийняти відповідне до цієї інформації рішення;
та вчасно прийняти відповідне до цієї інформації рішення;
![]() - шлях, який пройшов транспортний засіб 1 за час уповільнення
- шлях, який пройшов транспортний засіб 1 за час уповільнення
![]() у положення
у положення
![]() ;
;
![]() - сформований розрив у парі транспортних засобів 1, 2 в транспортному потоці головного напрямку необхідний для безпечного роз’їзду транспортних засобів другорядного напрямку;
- сформований розрив у парі транспортних засобів 1, 2 в транспортному потоці головного напрямку необхідний для безпечного роз’їзду транспортних засобів другорядного напрямку;
![]() - час формування початкового розриву
- час формування початкового розриву
![]() у парі транспортних засобів 1, 2;
у парі транспортних засобів 1, 2;
![]() - час, за який водій транспортного засобу 1 розпізнає інформацію на дорожньому знаку
- час, за який водій транспортного засобу 1 розпізнає інформацію на дорожньому знаку
![]() та приймає рішення щодо виконання його вимог;
та приймає рішення щодо виконання його вимог;
![]() - час остаточного формування розриву в парі транспортних засобів 1, 2 у транспортному потоці головного напрямку.
- час остаточного формування розриву в парі транспортних засобів 1, 2 у транспортному потоці головного напрямку.
Таким чином, запропонована система управління транспортними потоками головного напрямку на нерівнозначних нерегульованих перехрестях на одному рівні, яка дозволяє підвищити безпеку руху під час роз’їзду транспортних засобів другорядного напрямку. Розроблена схема та технологія роботи вказаної системи.
До перспективи подальших досліджень слід віднести розробку робочого проекту системи управління транспортними потоками головного напрямку на перехрестях на одному рівні з відповідним програмним забезпеченням для керуючого пристрою.
Література:
1. Полозенко П.М. Комплексна оцінка режимів світлофорного регулювання на перехрестях : Автореф . дис . ... канд. техн. наук: спец. 05.22.01 "Транспортні системи"; Український транспортний ун-т . - К., 1999. - 19с.
2. Поліщук В.П., Кунда Н.Т. Інформаційне забезпечення учасників дорожнього руху. – К.: ІЗИН, 1998. – 132 с.