Наши конференции
В данной секции Вы можете ознакомиться с материалами наших конференций
II МНПК "Спецпроект: анализ научных исследований"
II МНПК"Альянск наук: ученый ученому"
I Всеукраинская НПК"Образовательный процесс: взгляд изнутри"
II НПК"Социально-экономические реформы в контексте европейского выбора Украины"
III МНПК "Наука в информационном пространстве"
III МНПК "Спецпроект: анализ научных исследований"
I МНПК "Качество экономического развития"
III МНПК "Альянс наук: ученый- ученому"
IV МНПК "Социально-экономические реформы в контексте интеграционного выбора Украины"
I МНПК "Проблемы формирования новой экономики ХХI века"
IV МНПК "Наука в информационном пространстве"
II МНПК "Проблемы формирования новой экономики ХХI века"
I НПК "Язык и межкультурная коммуникация"
V МНПК "Наука в информационном пространстве"
II МНПК "Качество экономического развития"
IV МНПК "Спецпроект: анализ научных исследований"
ІІІ НПК "Образовательный процесс: взгляд изнутри"
VI МНПК "Социально-экономические реформы в контексте интеграционного выбора Украины"
МНПК «Проблемы формирования новой экономики ХХI века»
IV МНПК "Образовательный процесс: взгляд изнутри"
IV МНПК "Современные проблемы инновационного развития государства"
VI МНПК «Наука в информационном пространстве»
IV МНПК "Проблемы формирования новой экономики ХХI века"
II МНПК студентов, аспирантов и молодых ученых "ДЕНЬ НАУКИ"
VII МНРК "Социально-экономические реформы в контексте интеграционного выбора Украины"
VI МНПК "Спецпроект: анализ научных исследований"
VII МНПК "Наука в информационном пространстве"
II МНК "Теоретические и прикладные вопросы филологии"
VII МНПК "АЛЬЯНС НАУК: ученый - ученому"
IV МНПК "КАЧЕСТВО ЭКОНОМИЧЕСКОГО РАЗВИТИЯ: глобальные и локальные аспекты"
I МНПК «Финансовый механизм решения глобальных проблем: предотвращение экономических кризисов»
I Международная научно-практическая Интернет-конференция «Актуальные вопросы повышения конкурентоспособности государства, бизнеса и образования в современных экономических условиях»(Полтава, 14?15 февраля 2013г.)
I Международная научно-практическая конференция «Лингвокогнитология и языковые структуры» (Днепропетровск, 14-15 февраля 2013г.)
Региональная научно-методическая конференция для студентов, аспирантов, молодых учёных «Язык и мир: современные тенденции преподавания иностранных языков в высшей школе» (Днепродзержинск, 20-21 февраля 2013г.)
IV Международная научно-практическая конференция молодых ученых и студентов «Стратегия экономического развития стран в условиях глобализации» (Днепропетровск, 15-16 марта 2013г.)
VIII Международная научно-практическая Интернет-конференция «Альянс наук: ученый – ученому» (28–29 марта 2013г.)
Региональная студенческая научно-практическая конференция «Актуальные исследования в сфере социально-экономических, технических и естественных наук и новейших технологий» (Днепропетровск, 4?5 апреля 2013г.)
V Международная научно-практическая конференция «Проблемы и пути совершенствования экономического механизма предпринимательской деятельности» (Желтые Воды, 4?5 апреля 2013г.)
Всеукраинская научно-практическая конференция «Научно-методические подходы к преподаванию управленческих дисциплин в контексте требований рынка труда» (Днепропетровск, 11-12 апреля 2013г.)
VІ Всеукраинская научно-методическая конференция «Восточные славяне: история, язык, культура, перевод» (Днепродзержинск, 17-18 апреля 2013г.)
VIII Международная научно-практическая Интернет-конференция «Спецпроект: анализ научных исследований» (30–31 мая 2013г.)
Всеукраинская научно-практическая конференция «Актуальные проблемы преподавания иностранных языков для профессионального общения» (Днепропетровск, 7–8 июня 2013г.)
V Международная научно-практическая Интернет-конференция «Качество экономического развития: глобальные и локальные аспекты» (17–18 июня 2013г.)
IX Международная научно-практическая конференция «Наука в информационном пространстве» (10–11 октября 2013г.)
Антипова А.С., к.ф.-м.н . Бирюков В.Г.
Саратовский государственный университет им. Н.Г. Чернышевского, Российская Федерация
КИНЕМАТИЧЕСКАЯ ЗАДАЧА ПРОСТРАНСТВЕННОГО ОПТИМАЛЬНОГО РАЗВОРОТА ТВЁРДОГО ТЕЛА
Теория оптимального управления изучает методы решения задач о выборе наилучшего в некотором заранее определенном смысле способе осуществления управления некоторым динамическим процессом. В качестве критерия оптимальности может ставиться цель достижения максимума или минимума заданной совокупности критериев качества систем. Так, например, в рассматриваемой задаче ориентации в качестве критерия оптимальности выбирается минимизация интегрального квадратичного функционала качества, подынтегральной функцией которого являются компоненты вектора абсолютной угловой скорости. Такой функционал качества характеризует энергетические затраты на управление. Работа посвящена аналитическому и численному решению кинематической задачи оптимальной переориентации твёрдого тела, когда в качестве управляющего воздействия рассматривается вектор абсолютной угловой скорости тела. Эта задача имеет большое значение в механике космического полета и в задачах управления ориентации подвижных объектов.
Угловое движение твёрдого тела описывается кватернионным дифференциальным кинематическим уравнением:
![]() , (1)
, (1)
где
![]() - кватернион, характеризующий ориентацию твёрдого тела относительно инерциальной системы координат,
- кватернион, характеризующий ориентацию твёрдого тела относительно инерциальной системы координат,
![]() - абсолютная угловая скорость твёрдого тела, заданная своими проекциями на оси связанной системы координат, знак «
- абсолютная угловая скорость твёрдого тела, заданная своими проекциями на оси связанной системы координат, знак «
![]() » означает кватернионное произведение, а точка означает дифференцирование по времени [1].
» означает кватернионное произведение, а точка означает дифференцирование по времени [1].
Рассмотрим кинематическую задачу оптимального управления угловым движением твердого тела. Задача заключается в построении оптимального управления (в качестве управления в кинематических задачах выступает вектор абсолютной угловой скорости
![]() ), переводящего твёрдое тело из заданного начального углового положения, задаваемого кватернионом начальной ориентации
), переводящего твёрдое тело из заданного начального углового положения, задаваемого кватернионом начальной ориентации
![]() (2)
(2)
в заданное конечное угловое положение, задаваемое кватернионом конечной ориентации
![]() (3)
(3)
при этом должен минимизироваться функционал качества
 , (4)
, (4)
где
![]() (i=1,2,3) – проекции вектора
(i=1,2,3) – проекции вектора
![]() на оси связанной с телом системы координат,
на оси связанной с телом системы координат,
![]() - весовые множители функционала
- весовые множители функционала
![]() .
.
Функционал (4) характеризует, в некотором смысле, общие энергетические затраты на управление. Управление полагаем неограниченным, а время ориентации T – фиксированным (заданным).
Поставленная задача решалась применением метода Л.С. Понтрягина [3]. Следуя этому методу, была составлена функция Гамильтона-Понтрягина [4] и система однородных дифференциальных уравнений относительно сопряженных переменных
![]()
![]()
или в скалярном виде
 (5)
(5)
![]()
Для неограниченного управления из условия максимума функции Гамильтона–Понтрягина был получен закон оптимального управления как функция сопряженных переменных и весовых множителей функционала
 (6)
(6)
В результате задача была сведена к решению системы дифференциальных уравнений (1) и (5), замкнутой относительно закона оптимального управления (6), с начальными условиями (2), (3).
После ряда преобразований, получаем систему дифференциальных уравнений для нахождения закона оптимального управления [2]
 (7)
(7)
В частном случае равенства всех весовых множителей (
![]() ) система, очевидно, имеет решение
) система, очевидно, имеет решение
 (8)
(8)
Используя заданные начальные и конечные условия, получим, что оптимальное управление имеет вид
 . (9)
. (9)
Этот случай соответствует плоскому развороту твёрдого тела.
При двух равных между собой весовых множителях
![]() система (7) принимает вид
система (7) принимает вид
 (10)
(10)
Решение этой системы запишется в виде
 (11)
(11)
где
![]() постоянные интегрирования, определяемые из краевых условий.
постоянные интегрирования, определяемые из краевых условий.
Решения кватернионного дифференциального уравнения (1), замкнутого оптимальным управлением (11), имеет вид
 , (12)
, (12)
где
![]() - постоянный вектор, который выражается через постоянные интегрирования
- постоянный вектор, который выражается через постоянные интегрирования
![]() следующим образом
следующим образом
![]() . Для определения постоянного вектора
. Для определения постоянного вектора
![]() воспользуемся конечным условием (3)
воспользуемся конечным условием (3)
 (13)
(13)
Введя
![]() , можем переписать (13) в скалярном виде
, можем переписать (13) в скалярном виде
 (14)
(14)
Таким образом, для нахождения кватерниона ориентации твёрдого тела
![]() остаётся найти компоненты
остаётся найти компоненты
![]() . Они находятся численно, решая уравнение (14) относительно
. Они находятся численно, решая уравнение (14) относительно
![]() . Получив эти величины, можно найти раннее введённые
. Получив эти величины, можно найти раннее введённые
![]() , а после, пользуясь формулой (11), получить оптимальное управление
, а после, пользуясь формулой (11), получить оптимальное управление
![]() на каждом временном шаге
на каждом временном шаге
![]() .
.
Для численного решения системы (14) была разработана программа на языке программирования C#, реализующая метод Ньютона для нахождения неизвестного вектора
![]() [5] . В качестве начального приближения для
[5] . В качестве начального приближения для
![]() выбирались компоненты вектора оптимального управления из (8). На рис.1, рис.2 представлены результаты численного решения задачи для выбранных граничных условий.
выбирались компоненты вектора оптимального управления из (8). На рис.1, рис.2 представлены результаты численного решения задачи для выбранных граничных условий.
На рис.1 приведён график зависимости компонент кватерниона ориентации
![]() от времени при весовых множителях
от времени при весовых множителях
![]() и времени переориентации
T
=30c.
и времени переориентации
T
=30c.
Граничные условия задавались следующим образом:
начальное положение определялось кватернионом начальной ориентации
![]()
что соответствует самолётным углам
![]() ,
,
а конечное положение определялось кватернионом конечной ориентации
![]()
что соответствует самолётным углам
![]() .
.
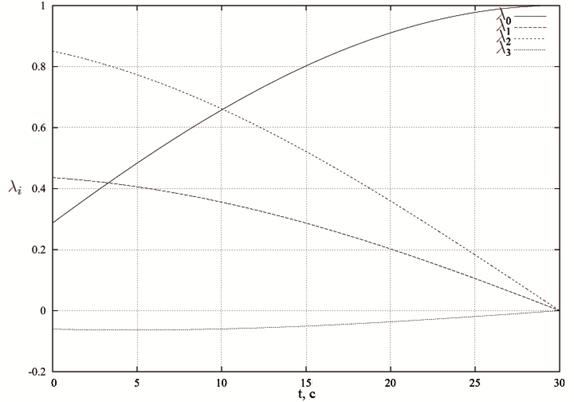
Рис. 1. Зависимость компонент кватерниона ориентации
![]() от времени t для случая, когда
от времени t для случая, когда
![]()
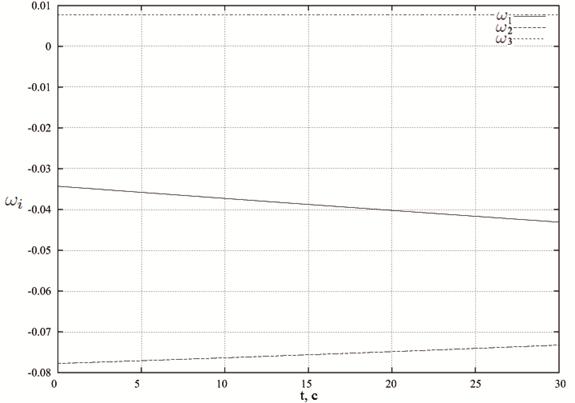
Рис. 2. График зависимости компонент вектора абсолютной угловой скорости
![]() от времени t для случая
от времени t для случая
![]()
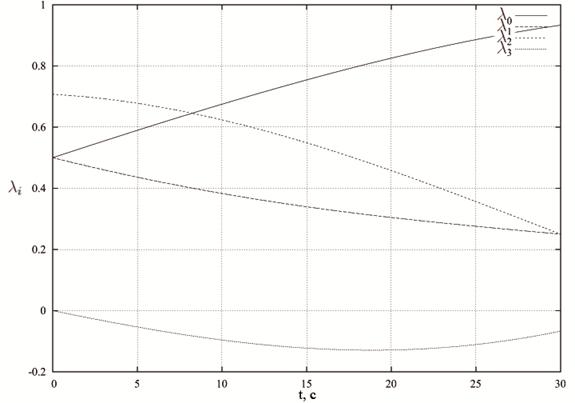
Рис. 3. Зависимость компонент кватерниона ориентации
![]() от времени t для случая, когда
от времени t для случая, когда
![]()
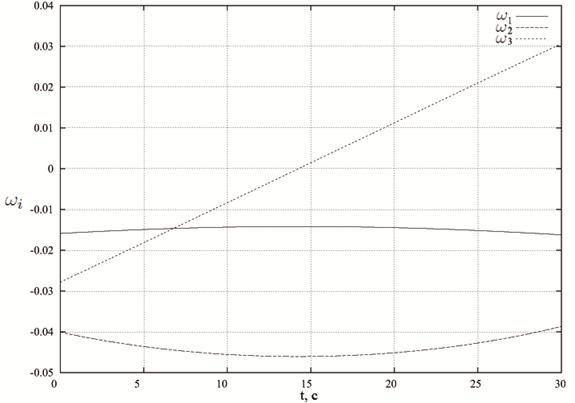
Рис. 4. График зависимости компонент вектора абсолютной угловой скорости
![]() от времени t для случая
от времени t для случая
![]()
На рис.2 приведен соответствующий график компонент вектора абсолютной угловой скорости
![]() от времени.
от времени.
Рассмотренный случай называют регулярной прецессией.
Для самого общего случая уравнения (7), когда все весовые множители различны, то есть
![]() , решение задачи выражается в эллиптических функциях. Для решения задачи было построено численное решение на языке программирования C# [7]. На рис.3, рис.4 представлены результаты численного решения данной задачи для выбранных граничных условий.
, решение задачи выражается в эллиптических функциях. Для решения задачи было построено численное решение на языке программирования C# [7]. На рис.3, рис.4 представлены результаты численного решения данной задачи для выбранных граничных условий.
На рис.3 представлен график зависимости компонент кватерниона ориентации
![]() от времени. Время переориентации задаётся равным
T
=30с, весовые множители
от времени. Время переориентации задаётся равным
T
=30с, весовые множители
![]() .
.
Граничные условия:
начальное положение задавалось кватернионом начальной ориентации
![]()
а конечное положение задавалось кватернионом конечной ориентации
![]()
что соответствует в начальном положении самолётным углам
![]() , а в конечном положении самолётным углам
, а в конечном положении самолётным углам
![]() .
.
На рис.4 приведен соответствующий график компонент вектора абсолютной угловой скорости
![]() от времени.
от времени.
Из приведенных рисунков видно, что построенные законы оптимального управления обеспечивают перевод тела из заданных начальных положений в заданные конечные положения.
Список использованной литературы:
1. Бранец В. Применение кватернионов в задачах ориентации твердого тела /В. Бранец , И. Шмыглевский . – М.: Наука, 1973. – 320 с .
2. Бухгольц Н. Основной курс теоретической механики. Ч. 2 / Н. Бухгольц . – М.: Наука, 1966. – 332 с .
3. Понтрягин Л.С. Математическая теория оптимальных процессов / [Л. С. Понтрягин, Е. Ф. Мищенко, В. Г. Болтянский , Р. В. Гамкрелидзе]. – М.: Наука, 1983. – 392 с .
4. Ройтенберг Я. Автоматическое управление / Я. Ройтенберг. – М.: Наука, 1971. – 396 с .
5. Гулин А. Численные методы / А. Гулин , А. Самарский . – М.: Наука, 1989. – 432 с .
6. Челноков Ю. Кватернионные и бикватернионные модели и методы механики твердого тела и их приложения. Геометрия движения / Ю. Челноков. – Саратов: СГУ им. Н. Г. Чернышевского, 2006. – 236 с .
7. Моисеев Н. Численные методы в теории оптимальных систем/ Н. Моисеев. – М.: Наука, 1971. – 424 с .