Наши конференции
В данной секции Вы можете ознакомиться с материалами наших конференций
II МНПК "Спецпроект: анализ научных исследований"
II МНПК"Альянск наук: ученый ученому"
I Всеукраинская НПК"Образовательный процесс: взгляд изнутри"
II НПК"Социально-экономические реформы в контексте европейского выбора Украины"
III МНПК "Наука в информационном пространстве"
III МНПК "Спецпроект: анализ научных исследований"
I МНПК "Качество экономического развития"
III МНПК "Альянс наук: ученый- ученому"
IV МНПК "Социально-экономические реформы в контексте интеграционного выбора Украины"
I МНПК "Проблемы формирования новой экономики ХХI века"
IV МНПК "Наука в информационном пространстве"
II МНПК "Проблемы формирования новой экономики ХХI века"
I НПК "Язык и межкультурная коммуникация"
V МНПК "Наука в информационном пространстве"
II МНПК "Качество экономического развития"
IV МНПК "Спецпроект: анализ научных исследований"
ІІІ НПК "Образовательный процесс: взгляд изнутри"
VI МНПК "Социально-экономические реформы в контексте интеграционного выбора Украины"
МНПК «Проблемы формирования новой экономики ХХI века»
IV МНПК "Образовательный процесс: взгляд изнутри"
IV МНПК "Современные проблемы инновационного развития государства"
VI МНПК «Наука в информационном пространстве»
IV МНПК "Проблемы формирования новой экономики ХХI века"
II МНПК студентов, аспирантов и молодых ученых "ДЕНЬ НАУКИ"
VII МНРК "Социально-экономические реформы в контексте интеграционного выбора Украины"
VI МНПК "Спецпроект: анализ научных исследований"
VII МНПК "Наука в информационном пространстве"
II МНК "Теоретические и прикладные вопросы филологии"
VII МНПК "АЛЬЯНС НАУК: ученый - ученому"
IV МНПК "КАЧЕСТВО ЭКОНОМИЧЕСКОГО РАЗВИТИЯ: глобальные и локальные аспекты"
I МНПК «Финансовый механизм решения глобальных проблем: предотвращение экономических кризисов»
I Международная научно-практическая Интернет-конференция «Актуальные вопросы повышения конкурентоспособности государства, бизнеса и образования в современных экономических условиях»(Полтава, 14?15 февраля 2013г.)
I Международная научно-практическая конференция «Лингвокогнитология и языковые структуры» (Днепропетровск, 14-15 февраля 2013г.)
Региональная научно-методическая конференция для студентов, аспирантов, молодых учёных «Язык и мир: современные тенденции преподавания иностранных языков в высшей школе» (Днепродзержинск, 20-21 февраля 2013г.)
IV Международная научно-практическая конференция молодых ученых и студентов «Стратегия экономического развития стран в условиях глобализации» (Днепропетровск, 15-16 марта 2013г.)
VIII Международная научно-практическая Интернет-конференция «Альянс наук: ученый – ученому» (28–29 марта 2013г.)
Региональная студенческая научно-практическая конференция «Актуальные исследования в сфере социально-экономических, технических и естественных наук и новейших технологий» (Днепропетровск, 4?5 апреля 2013г.)
V Международная научно-практическая конференция «Проблемы и пути совершенствования экономического механизма предпринимательской деятельности» (Желтые Воды, 4?5 апреля 2013г.)
Всеукраинская научно-практическая конференция «Научно-методические подходы к преподаванию управленческих дисциплин в контексте требований рынка труда» (Днепропетровск, 11-12 апреля 2013г.)
VІ Всеукраинская научно-методическая конференция «Восточные славяне: история, язык, культура, перевод» (Днепродзержинск, 17-18 апреля 2013г.)
VIII Международная научно-практическая Интернет-конференция «Спецпроект: анализ научных исследований» (30–31 мая 2013г.)
Всеукраинская научно-практическая конференция «Актуальные проблемы преподавания иностранных языков для профессионального общения» (Днепропетровск, 7–8 июня 2013г.)
V Международная научно-практическая Интернет-конференция «Качество экономического развития: глобальные и локальные аспекты» (17–18 июня 2013г.)
IX Международная научно-практическая конференция «Наука в информационном пространстве» (10–11 октября 2013г.)
Исследовательский стенд полунатурного моделирования системы ориентации КЛА
Д. В. Тетеревятников, О. А. Лученко , О. И. Гавриленко
Процесс проектирования систем автоматического управления для космоса представляет собой сложную научно-техническую задачу эффективное решение которой зачастую требует создания аппаратно-программных комплексов полунатурного моделирования в реальном масштабе времени подсистем и агрегатов. Описываемый комплекс предназначен для разработки и отладки алгоритмов диагностирования и восстановления функционального состояния системы ориентации КЛА. Аппаратная часть комплекса полунатурного моделирования состоит из персонального компьютера (ПК), контроллера управления и моделирования ( КУиМ ), имитатора спутника, блока аналоговых исполнительных элементов – двигателей-маховиков, а также блока датчиков.
На рис. 1 представлена функциональная схема стенда полунатурного моделирования системы ориентации.
Рис.1. Функциональная схема стенда полунатурного моделирования системы ориентации
На данном рисунке приняты следующие обозначения: МК – микроконтроллерное устройство (с указанием выполняющих им функций); БДв – блок двигателей-маховиков (исполнительного устройства КЛА); ОУ – объект управления (спутник); БД – блок датчиков; КУ – корректирующее устройство (закон управления каналом микроспутника); УМ – усилитель мощности; ИМ – исполнительный механизм (двигатель постоянного тока); МБ – маховичный блок (инерционный маховик с механическим ограничителем момента); ИУ – измерительное устройство (звездный датчик или датчик угловой скорости спутника).
Основным вычислительным устройством в составе комплекса является ПК. Она включена в структуру стенда для визуализации хода эксперимента, анализа экспериментальных данных, подачи внешних тестовых управляющих сигналов. Однако ПК не позволяет без дополнительного оборудования осуществлять контроль и управление остальной аппаратурой комплекса. Поэтому вышеуказанные функции были возложены на микропроцессорную подсистему – контроллер управления и моделирования ( КУиМ ).
Одной из задач КУиМ является организация работы блока аналоговых исполнительных элементов – двигателей-маховиков, имитатора спутника, блока датчиков. Для ее решения в состав КУиМ введены блоки АЦП и ШИМ, позволяющие передавать управляющие сигналы на исполнительные элементы и считывать выходные напряжения с датчиков угловой скорости двигателей-маховиков, имитатора КЛА, блока датчиков спутника. В режиме реального времени КУиМ решает задачу стабилизации скорости вращения маховиков, используя показания датчиков и передавая управляющее воздействие на исполнительные элементы КЛА.
На рис. 2 представлена функциональная схема контроллер а управления и моделирования
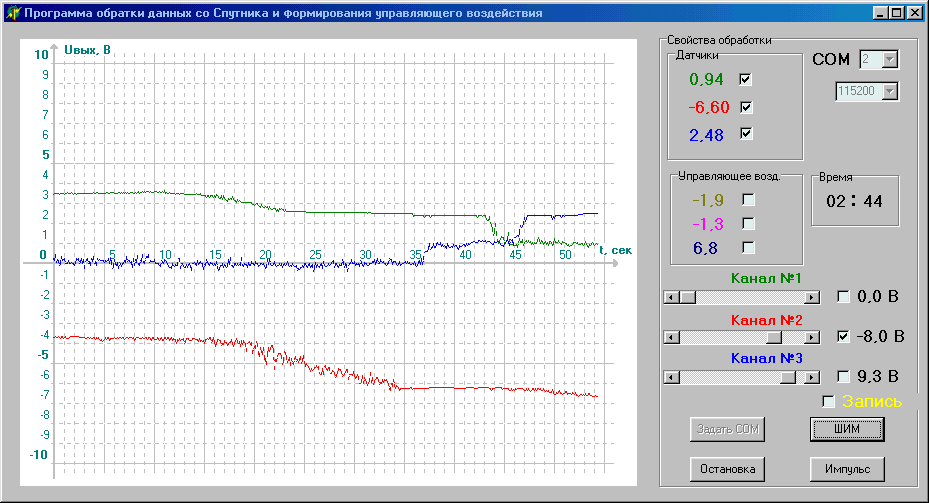
Рис. 2. Функциональная схема контроллера управления и моделирования
На представленной функциональной схеме приняты следующие обозначения: МК – микроконтроллер ( AT 89 S 8252); УСУ – устройство согласования уровней; ВЗЦ – время задающая цепь; К – коммутатор; БСС – блок согласования сигналов; УП – устройство преобразования (однополярного ШИМа в двухполярный ); COM -порт – порт обмена данных с персональным компьютером; ОАУ – объект автоматического управления (исполнительный орган микроспутника с блоком датчиков); МКУ – микроконтроллерное устройство; ПС – плата сопряжения МКУ с ОАУ.
Разработанный контроллер управления и моделирования позволяет выполнять следующие функции: получение информации о состоянии контролируемых параметров системы, формирование заданного управляющего воздействия, передача полученной информации на ПК, реализация алгоритмов диагностирования и восстановления работоспособности.
На рис. 3 приведены полученные статическая и динамическая характеристики двигателя-маховика одного из каналов управления.
Рис. 3. Статическая и динамическая характеристики
Разработанное программное обеспечение для ПК и КУиМ позволяет в режиме реального времени производить снятие статических и динамических характеристик исследуемого блока, выводить графическое представление контролируемых параметров, задавать конфигурацию системы (замкнута, разомкнута), с ПК задавать закон управления контуров исследуемой системы управления, изменять алгоритмы диагностирования и восстановления, а также регистрировать результаты в виде, удобном для проведения дальнейшего анализа системы.
На рис. 4 представлена одна из экранных форм разработанного ПО к исследовательскому стенду.
Рис.4. Экранная форма исследовательского стенда
На ней отображены: численные значения контролируемых параметров, их графическое отображение в режиме реального времени. С ее помощью можно задать режим работы системы и задающие воздействия на каналы управления системы.